Эту страницу предлагается объединить со страницей Дискета. |
Содержимое этой статьи нуждается в чистке. |
Накопитель на гибких магнитных дисках (НГМД; англ. floppy disk drive) — дисковод, предназначенный для считывания и записи информации с дискеты. Работает по тем же физическим принципам, что и магнитофон, и фактически является его специализированной разновидностью.




Приводы (позиционирования головок и вращения) и система считывания-записи управляется электронной схемой, размещённой на печатной плате, которая находится внутри корпуса дисковода. В отечественной терминологии система управления называлась КНГМД — контроллер накопителя на гибких магнитных дисках.
Накопители на гибких дисках, ровно как и сами носители — дискеты, были массово распространены с 1970-х и до конца 1990-х годов. В XXI веке НГМД уступают место более ёмким CD, DVD и удобным в использовании флеш-накопителям.
История
править- 1967 год — Алан Шугарт возглавлял команду, которая разрабатывала дисководы в лаборатории фирмы IBM, где были созданы накопители на гибких дисках. Дэвид Нобл (англ. David Noble), один из старших инженеров, работающих под его руководством, предложил гибкий диск (прообраз дискеты диаметром 8″) и защитный кожух с тканевой прокладкой.
- 1971 год — фирмой IBM была представлена первая дискета диаметром в 8″ (200 мм) с соответствующим дисководом.
- 1973 год — Алан Шугарт основывает собственную компанию Shugart Associates.
- 1976 год — Финне Коннер (англ. Finis Conner) пригласил Алана Шугарта принять участие в разработке и выпуске дисководов с жёсткими дисками диаметром 5¼″, в результате чего Shugart Associates, разработав контроллер и оригинальный интерфейс Shugart Associates SA-400, выпустила дисковод для миниатюрных (mini-floppy) гибких дисков на 5¼″, который, быстро вытеснив дисководы для дисков 8″, стал популярным в персональных компьютерах. Компания Shugart Associates также создала интерфейс Shugart Associates System Interface (SASI), который после формального одобрения комитетом ANSI в 1986 году был переименован в Small Computer System Interface (SCSI).
- 1981 год — компания Sony выводит на рынок дискету диаметром 3½″ (90 мм). В первой версии (DD) объём составляет 720 килобайт (9 секторов). В 1984 году компания Hewlett-Packard впервые использовала этот накопитель в своем компьютере HP-150. Поздняя версия (HD) имеет объём 1440 килобайт (1,44 мегабайта; 18 секторов).
- 1984 год — компания Apple стала использовать накопители 3½″ в компьютерах Macintosh
- 1987 год — 3½″ HD накопитель появился в компьютерных системах PS/2 фирмы IBM и становится стандартом для массовых ПК.
- 1987 год — официально представлены разработанные в 1980-х годах компанией Toshiba дисководы сверхвысокой плотности (англ. Extra High Density, ED), носителем для которых служила дискета ёмкостью 2880 килобайт (2,88 мегабайта; 36 секторов).
Конструкция
правитьМеханика
правитьДля считывания с поверхности диска двигатель, который осуществляет перемещения головок по диску в двух направлениях с определённым приращением, или шагом, называется шаговым двигателем. Двигатель управляется контроллером диска, который устанавливает головки в соответствии с любым относительным превращением в пределах границ перемещения привода головок. В миниатюрных дисководах на 3½″ головки монтируются на червячной передаче, приводимой в движение непосредственно валом шагового двигателя.
Диски имеют два типа плотности — радиальную и линейную. Радиальная плотность указывает, сколько дорожек может быть записано на диске, и выражается в количестве дорожек на дюйм (англ. Track Per Inch, TPI). Линейная плотность — это способность отдельной дорожки накапливать данные и выражается в количестве битов на дюйм (англ. Bits Per Inch, BPI). Шаговые двигатели не могут осуществлять непрерывное позиционирование, обычно он поворачивается на точно определённый угол и останавливается. Большинство шаговых двигателей, установленных в дисководах гибких дисков, осуществляют перемещение с определённым шагом, связанным с расстоянием между дорожками на диске. За исключением дисковода гибких дисков диаметром 5¼″ ёмкостью 360 Кбайт, которые выпускались только с плотностью 48 TPI и в которых использовался шаговый двигатель с приращением 3,6°, во всех остальных типах дисководов (96 или 135 TPI) обычно используется шаговый двигатель с приращением 1,8°. Кроме того, шаговый двигатель выполняет перемещение между фиксированными ограничителями и должен останавливаться при определённом положении ограничителя.
Позиционирование головок — это операция расположения головок относительно дорожек на диске (узкие концентрические кольца на диске), позволяет приступить к чтению или записи информации на диск. Цилиндр (англ. cylinder) — количество дорожек, с которых можно считать информацию, не перемещая головок. Кольцевые дорожки, расположенные друг под другом на разных сторонах диска, образуют воображаемый цилиндр, отсюда и название. Термин обычно используется как синоним дорожки, а поскольку гибкий диск в дискете имеет две стороны, а дисковод для гибких дисков — только две головки, в гибком диске на один цилиндр приходится две дорожки.
- Конструкция дисководов
-
 Чертежи из патентов IBM
Чертежи из патентов IBM -
 Головки чтения/записи 3½″ дисковода гибких дисков
Головки чтения/записи 3½″ дисковода гибких дисков


Электроника
правитьЭтот раздел не завершён. |
- Конструкция дисководов
-
 Shugart SA 400 Minifloppy — 5¼″ дисковод гибких дисков с интерфейсом Shugart SA400.
Shugart SA 400 Minifloppy — 5¼″ дисковод гибких дисков с интерфейсом Shugart SA400. -
 Shugart SA 400 Minifloppy — вид сзади.
Shugart SA 400 Minifloppy — вид сзади. -
 Контроллер дисковода гибких магнитных дисков (КНГМД) IBM PC/XT для подключения внутреннего и внешнего дисковода.
Контроллер дисковода гибких магнитных дисков (КНГМД) IBM PC/XT для подключения внутреннего и внешнего дисковода.



Подключение
правитьДля подключения дисковода имеются два разъема: один для электрического питания, а другой для передачи данных и сигналов управления. Эти разъемы в компьютерной промышленности стандартизованы: для подключения питания используется четырёхконтактный линейный разъем Mate-N-Lock фирмы AMP большого и малого размеров, сигнальный — 34-контактные разъемы. В дисководах формата 5¼″ обычно используется большой разъем для питания, в то время как в большинстве дисководов формата 3½″ для питания используется разъем меньшего размера.
«Странность» сигнального кабеля заключается в том, что линии 10—16 разрезаны и переставлены (перекручены) между разъемами дисководов. Это перекручивание переставляет первое и второе положения перемычки выбора дисковода и сигналы включения двигателя, а следовательно, меняет на противоположные установки сигнала DS для дисковода, находящегося за перекручиванием. Соответственно все дисководы в компьютере с этим типом кабеля имеют перемычки, установленные одинаково, а настройка и установка дисководов (вместо первый и второй, они обозначаются в системе как A и B) упрощается. Как правило, материнская плата содержит интегрированный контроллер дисководов (ровно как и отдельная плата контроллера, существовавшая ранее), обеспечивающий установку пары дисководов.
При подключении кабелей необходимо учитывать их ориентацию, в случае если неправильно подключён сигнальный кабель, лампочка на лицевой панели дисковода будет светиться сразу после подачи питания. В случае же неправильной ориентации кабеля питания на электронную схему управления дисководом вместо 5 В подаётся питание 12 В, что гарантированно приводит к выходу её из строя. Учитывая, что стоимость ремонта штучной платы превышает оптовую стоимость самого дисковода, ремонт дисковода, как правило, экономически не целесообразен.
- Электрическое подключение дисководов
-
 Интерфейс для подключения 3½″ дисковода гибких дисков: малогабаритный разъём питания и разъём для подключения 34-контактного сигнального кабеля.
Интерфейс для подключения 3½″ дисковода гибких дисков: малогабаритный разъём питания и разъём для подключения 34-контактного сигнального кабеля. -
 Кабели: слева питания, справа — сигнальный.
Кабели: слева питания, справа — сигнальный. -
 „Странный“ сигнальный кабель со скруткой.
„Странный“ сигнальный кабель со скруткой. -
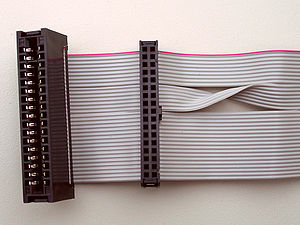 Колодки для подключения 5¼″ (слева на фото) и 3½″ (справа) дисководов различны. Для подключения на кабеле 3½″ дисковода к колодке для 5¼″ дисковода, мог быть использован специальный переходник.
Колодки для подключения 5¼″ (слева на фото) и 3½″ (справа) дисководов различны. Для подключения на кабеле 3½″ дисковода к колодке для 5¼″ дисковода, мог быть использован специальный переходник.




Программирование контроллера
правитьКонтроллер гибких дисков, со стороны современного программирования, выглядит достаточно примитивно — регистры, имеющие байтовую организацию, сведены в блок из восьми последовательно расположенных ячеек (реально используется лишь часть из них).
| Адрес | Обозначение | Чтение/Запись | Назначение |
|---|---|---|---|
| 3F016 | - | - | Не используется |
| 3F116 | - | - | Не используется |
| 3F216 | DOR | Чтение/Запись | Регистр цифрового вывода |
| 3F316 | TSR | Чтение/Запись | Регистр привода ленточного накопителя |
| 3F416 | MSR | Чтение | Основной регистр статуса |
| 3F416 | DSR | Запись | Регистр выбора скорости передачи данных |
| 3F516 | FIFO | Чтение/Запись | Регистр буфера данных |
| 3F616 | - | - | Не используется |
| 3F716 | DIR | Чтение | Регистр цифрового ввода |
| 3F716 | CCR | Запись | Регистр управления конфигурацией |
- биты 0 и 1 (DS0 и DS1) — двоичное кодирование выбираемого дисковода (одного из четырёх),
- бит 2 (nRES) — разрешение работы контроллера (1) / сброс контроллера (0),
- бит 3 (DMAE) — управление работой схемы регенерации сигналов прерывания и прямого доступа к памяти (0 — разрешено, 1 — запрещено),
- бит 4 (ME0), 5 (ME1), 6 (ME2) и 7 (ME3), — управление мотором вращения диска дисковода 0, 1, 2 и 3 соответственно (1 — двигатель включен).
Предназначен для обслуживания ленточного накопителя, поэтому использует свободные разряды (с третьего по восьмой), но не имеет единого стандарта.
Доступен только для записи. В «1» соответствующий бит устанавливается в случае следующего состояния:
- бит 0 (D0B) — дисковод 0 находится в состоянии поиска,
- бит 1 (D1B) — дисковод 1 находится в состоянии поиска,
- бит 2 (D2B) — дисковод 2 находится в состоянии поиска,
- бит 3 (D3B) — дисковод 3 находится в состоянии поиска,
- бит 4 (CB) — контроллер занят выполнением команды,
- бит 5 (NDMA) — выполняемая контроллером операция не использует ПДП (NonDMA),
- бит 6 (DIO) — текущее направление передачи данных от процессора к контроллеру (0) или от контроллера к процессору (1),
- бит 7 (RQM) — регистр данных FIFO готов к обмену с процессором.
- биты 0 и 1 (DRATE) — кодируют скорость передачи данных:
| Значение разрядов DRATE | Скорость передачи данных | ||
|---|---|---|---|
| Бит 1 | Бит 0 | Режим FM | Режим MFM |
| 0 | 0 | 250 кб/с | 500 кб/с |
| 0 | 1 | 150 кб/с | 300 кб/с |
| 1 | 0 | 125 кб/с | 250 кб/с |
| 1 | 1 | - | 1 Мб/с |
- биты 2, 3 и 4 (PRECOMP) — кодируют параметр задержки предкомпенсации:
| Значение разрядов PRECOMP | Задержка предкомпенсации, нс | ||
|---|---|---|---|
| Бит 4 | Бит 3 | Бит 2 | |
| 0 | 0 | 0 | «По умолчанию» |
| 0 | 0 | 1 | 41,67 |
| 0 | 1 | 0 | 83,34 |
| 0 | 1 | 1 | 125,00 |
| 1 | 0 | 0 | 166,67 |
| 1 | 0 | 1 | 208,33 |
| 1 | 1 | 0 | 250,00 |
| 1 | 1 | 1 | 0 (нет предкомпресии) |
- бит 5 не используется, должен содержать 1,
- бит 6 (Power Down) — если 1, то контроллер переходит в режим пониженного электропитания, для выхода используется программный или аппаратный сброс,
- бит 7 (S/W Reset) — установка в 1 этого разряда вызовет сброс контроллера. По окончании операции сбрасывается автоматически.
Участвует во всех дисковых операциях чтения и записи. Ёмкость — 16 байт.
Доступен только для считывания. Старший разряд (англ. Disk CHange, DCH) отображает сигнал смены диска, остальные — зарезервированные.
Доступен только для записи. Два младших разряда дублируют функции регистра DSR в аспекте задачи скорости передачи данных, остальные разряды зарезервированные.
Сведения о состоянии контроллера ST0—ST3
правитьСведения о состоянии контроллера хранятся в не имеющих собственных адресов, и поэтому недоступных, регистрах.
Форматы
править8″
править
Первые дисководы были предназначены для работы с дискетами диаметром 8″, которые вмещали 80, 256 или 800 КБ информации.
5¼″
править
.jpg)
Следующим массовым форматом стали дискеты диаметром 5¼″; распространение с ними получили и соответствующие дисководы.
В качестве устройства для постоянного хранения данных первого массового персонального компьютера — IBM PC, выпущенного в 1981 году фирмой IBM, — предполагалось использовать один или два накопителя на 5¼-дюймовых гибких дисках.
Высота дисковода для 5¼-дюймовых дискет равна 1 U, а ширина почти равна трём его высотам. Это иногда использовали производители корпусов компьютеров, где три устройства, помещённые в квадратную «корзину», могли быть вместе с ней переориентированы с горизонтального на вертикальное расположение.
3½″
правитьДисководы формата 3½″ высокой плотности (неформатированная ёмкость дискеты, определяемая плотностью записи и площадью носителя, составляет 2 Мб) впервые появились в компьютерах IBM PS/2 в 1987 году. Эти дисководы записывают Шаблон:Numцилиндров с 18 секторами на дорожке, создавая в результате ёмкость 1,44 Мб, имеют скорость вращения 300 об/мин и записывают в 1,2 раза больше данных, чем дисководы формата 5¼″ на 1,2 Мб (скорость передачи данных в этих дисководах высокой плотности одинакова, и они совместимы с одними и теми же контроллерами высокой и низкой плотности). Для того, чтобы использовать максимальную для большинства стандартных контроллеров дисководов высокой и низкой плотности скорость передачи данных 500 000 бит/с, эти дисководы должны иметь скорость 300 об/мин. Если дисковод будет вращать дискету со скоростью 360 об/мин (как дисковод формата 5¼″), то число секторов на дорожку должно быть уменьшено до 15, иначе контроллер не будет успевать обрабатывать сигналы.
Промышленный выпуск дисководов сверхвысокой ёмкости на 2,88 Мбайт Toshiba начала в 1989 году. В 1991 году IBM официально приняла эти дисководы для установки в компьютерах PS/2, и практически все PS/2, выпущенные с тех пор, содержат эти дисководы как стандартное оборудование. Для работы с такими дисководами требуется установленная ОС MS-DOS версии 5.0 или старше.
Для правильной работы дисковода на 2,88 Мб необходимо обновление дискового контроллера, так как эти дисководы имеют ту же скорость вращения 300 об/мин, но записывают 36, а не 18 секторов на одной дорожке. В отличие от контроллеров дисководов предыдущих форматов, максимальная скорость передачи данных которых составляет 500 000 бит/с, для того что бы эти 36 секторов были считаны или записаны за то же время, которое требуется дисководу на 1,44 Мбайт для чтения и записи 18 секторов, от контроллера требуется гораздо более высокой скорости передачи данных, 1 000 000 бит/с.
См. также
править
Для улучшения этой статьи желательно:
|